Informatique, électronique et train miniature (1/4)
Page classée dans : Microcontrôleurs et Micropython • Dernière mise à jour : 2023-10-02Page précédente : Microcontrôleurs et Micropython
Page suivante : Informatique, électronique et train miniature (2/4)
Cliquez sur l'image pour voir la vidéo
Ingrédients :
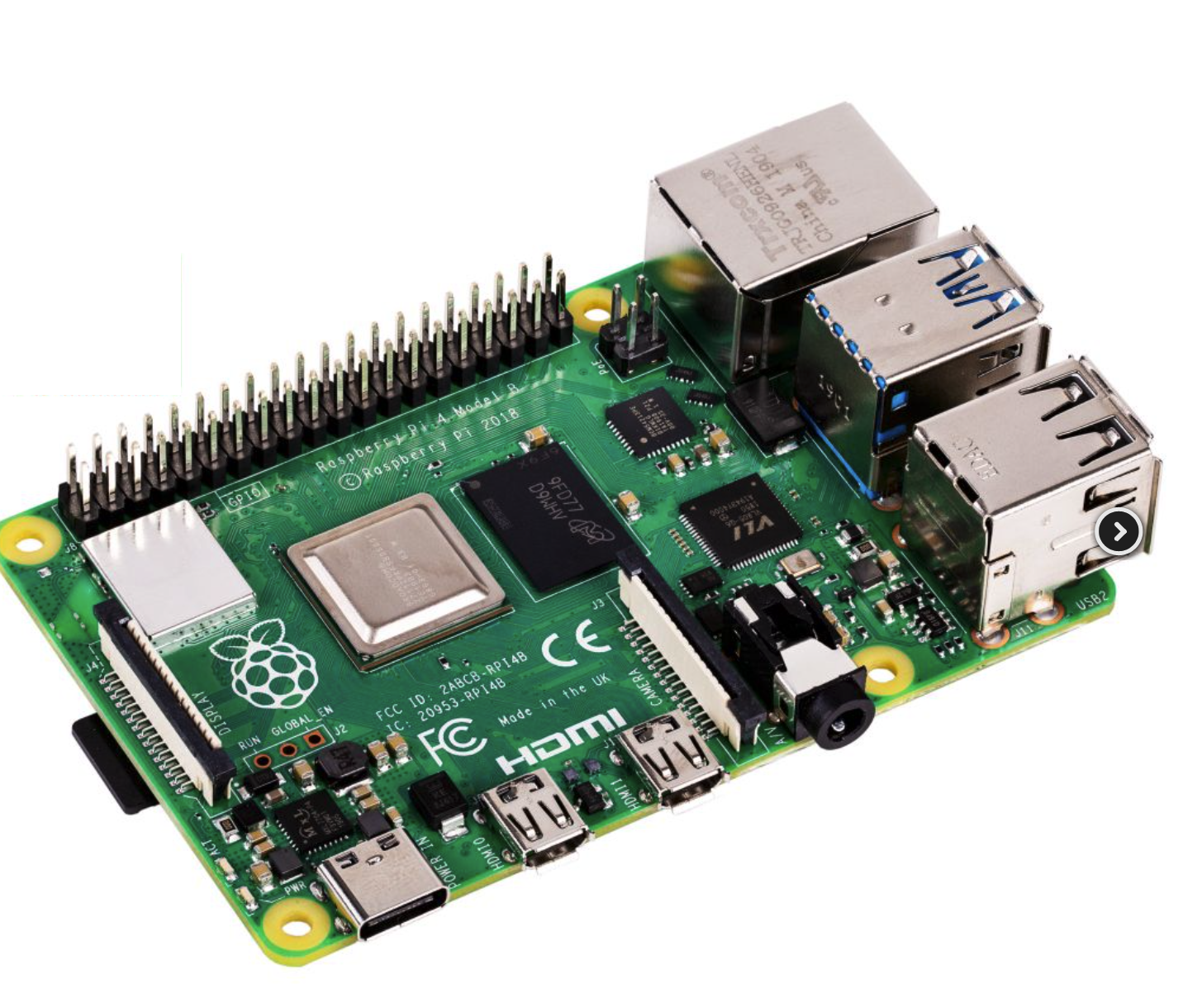
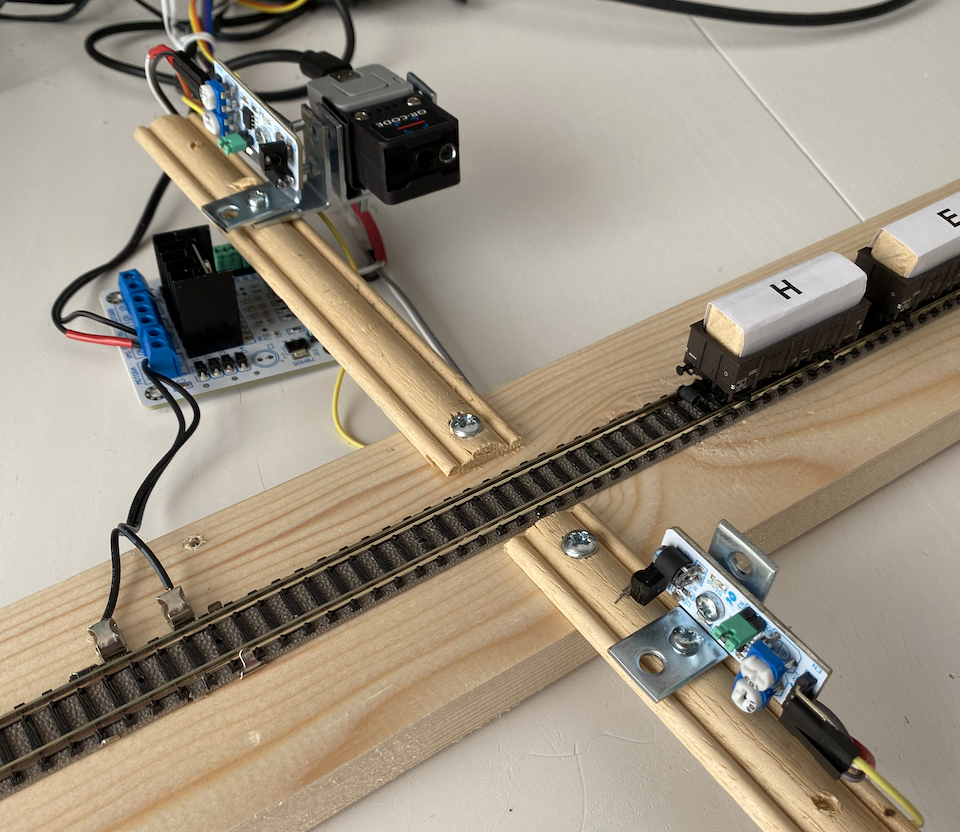
Un p'tit ordinateur Raspberry
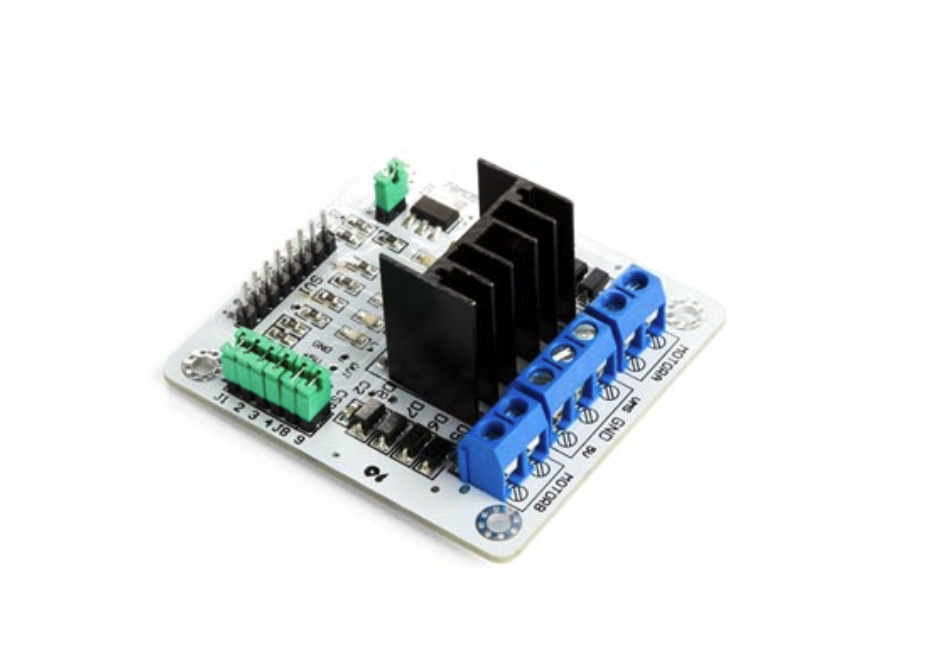
Un p'tit circuit pour réguler la vitesse du moteur
Contrôleur basé sur le chip DC L298N
Proposé par Velleman sous la référence WPI409
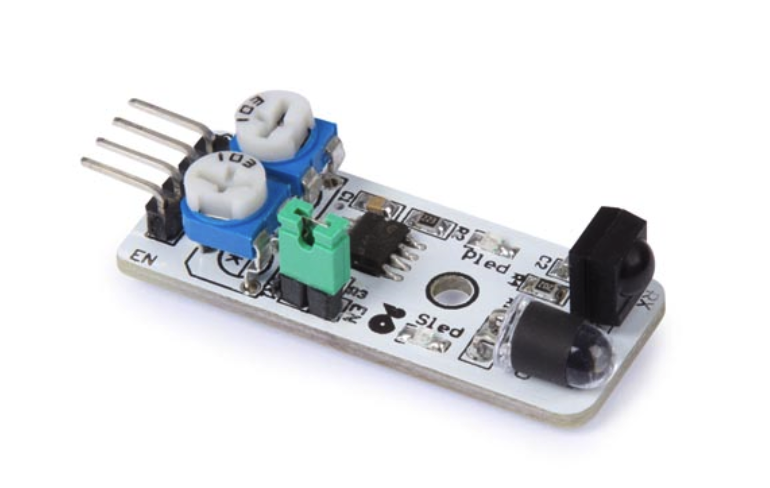
Un détecteur d'obstacle fonctionnant par infra-rouge
Velleman VMA330
Une locomotive à l'échelle N
Par exemple, la Loco Vossloh G1700BB /AM 843 - HOBBYTRAIN H2948
dans sa version "Chemins de Fer belges" ...

... parce qu'elle existe dans la réalité

Un lecteur de code-barre
M5Stack Kit Atom

Quelques wagons ...
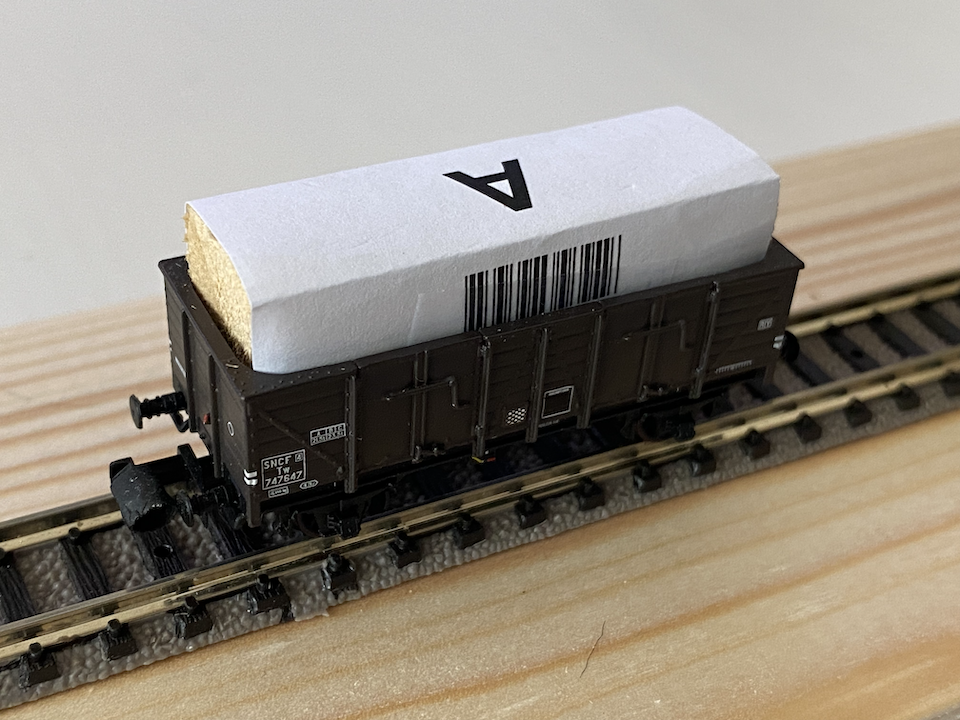
Un peu de bricolage ...
... et un peu de code Python
import time
import RPi.GPIO as GPIO
import serial
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
# Détecteur d'obstacle - Velleman VMA330
# Bien qu'un seul détecteur suffise en théorie (puisque le VMA330 comporte un émetteur I.R.
# et un récepteur qui détecte la lumière réfléchie par l'obstacle), deux détecteurs sont
# utilisés ici : l'un pour émettre le faisceau I.R., l'autre pour le détecter.
# Deux raisons à cela
# - éliminer les problèmes de détection liés à un objet trop sombre (p.ex. un wagon brun foncé ...)
# - affiner la zone de détection (p.ex. un espace entre deux wagons)
GPIO.setup(14, GPIO.IN, pull_up_down = GPIO.PUD_UP)
GPIO.setup(15, GPIO.IN, pull_up_down = GPIO.PUD_UP)
# La détection en 15 ne sera pas utilisée ...
# Module contrôleur moteur DC L298N - Velleman WPI409
# controlé par les pins 21, 20 et 16 du Raspberry
M1_En = 21
M1_In1 = 20
M1_In2 = 16
GPIO.setup(M1_En, GPIO.OUT)
GPIO.setup(M1_In1, GPIO.OUT)
GPIO.setup(M1_In2, GPIO.OUT)
GPIO.output(M1_In1, GPIO.LOW) # moteur a l'arret
GPIO.output(M1_In2, GPIO.LOW) # pour commencer ...
M1_Vitesse = GPIO.PWM(M1_En, 100) # découpage du signal pour réguler la vitesse
def arret():
GPIO.output(M1_In1, GPIO.LOW)
GPIO.output(M1_In2, GPIO.LOW)
def arriere():
M1_Vitesse.start(0)
GPIO.output(M1_In1, GPIO.HIGH)
GPIO.output(M1_In2, GPIO.LOW)
def avant():
M1_Vitesse.start(0)
GPIO.output(M1_In1, GPIO.LOW)
GPIO.output(M1_In2, GPIO.HIGH)
M1_Vitesse.start(0)
def manoeuvre():
M1_Vitesse.start(25)
#
# Lecteur de code-barre M5Stack + Kit Atom
# N.B. se programme "comme un Arduino" mais sans nécessiter un Arduino ...
# https://docs.m5stack.com/en/atom/atomic_qr
#
bar_code = serial.Serial("/dev/ttyUSB0", 9600, timeout=1)
time.sleep(0.1) # wait for serial to open
# table de relation entre un code-barre unique et une lettre (qui pourrait être répétée).
# Ne pas utiliser autre chose que des identifiants uniques comme codes-barres car
# cela permet d'éviter des problèmes d'interprétation si un même code est lu plusieurs fois
# (si un wagon passe lentement devant le lecteur, son code-barre est parfois lu plusieurs fois)
d = { '101':'H' ,
'102':'E' ,
'103':'L' ,
'104':'L' ,
'105':'O' ,
'106':' ' ,
'107':'W' ,
'108':'O' ,
'109':'R' ,
'110':'L' ,
'111':'D' ,
'112':'!'
}
answer = 0
liste = list()
read_ok = False
end = False
arret()
print('<ENTER> pour commencer')
input()
avant()
manoeuvre()
while not end: # attente wagon
ok = False
while not ok:
if GPIO.input (14) == 1:
ok = True
arret()
time.sleep(0.1)
read_ok = False
while read_ok is False: # attente code-barre
if bar_code.isOpen():
if bar_code.inWaiting()>0:
answer=bar_code.readline().decode(encoding='UTF-8',errors='strict')
for c in answer.split('\r'): # supprimer code "Carriage Return"
if c not in liste and c!= '': # ne garder que les nouveaux codes, c-à-d
liste.append(c) # ignorer un même code qui serait lu
# print (liste) # plusieurs fois
bar_code.flushInput() # remove data after reading
read_ok = True
avant() # quand le code a été lu, redémarrer
manoeuvre()
ok = False # détecter le passage au wagon suivant
w = 0 # par détection de l'interstice entre deux wagons
while not ok:
if GPIO.input (14) == 0:
ok = True
w = w + 1
if w > 15: # interstice trop grand <=> tout le train est passé => stop
ok = True # sortir de la boucle attente interstice
end = True # sortir de la boucle principale
time.sleep(0.1)
print ('terminé')
arret()
time.sleep(1)
arriere()
manoeuvre()
time.sleep(3.5)
arret()
print ('----------- ordre -----------')
for i in liste:
print (' ', d[i])
print()
print ('ENTER = FIN PROGR')
input()
print ('fin progr')
Programmation du lecteur de code-barres
Le lecteur de code-barres M5Stack se programme comme un microcontrôleur Arduino
/*Press button to scan, serial monitor will print information*/
#include <M5Atom.h>
#define TRIG 23
#define DLED 33
void setup() {
M5.begin(false, false, true);
Serial.begin(9600);
Serial2.begin(9600, SERIAL_8N1, 22, 19);
M5.dis.drawpix(0, 0x00f000);
pinMode(TRIG, OUTPUT);
pinMode(DLED, INPUT);
digitalWrite(TRIG, HIGH);
}
void loop() {
M5.update();
if(digitalRead(39) == LOW){
digitalWrite(TRIG, LOW);
}else {
digitalWrite(TRIG, HIGH);
}
if(digitalRead(DLED) == HIGH){
while(Serial2.available() > 0){
char ch = Serial2.read();
Serial.print(ch);
}
}
}
← Page précédente : Microcontrôleurs et Micropython
→ Page suivante : Informatique, électronique et train miniature (2/4)